 한국의
한국의 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 Tiếng việt
Tiếng việt


지금 전화 해
TEL : + 86-4000988557;
스카이프 ID : gfreex@hotmail.com;
위챗 : STEP_ADTECH;
QQ ID : 8936906.


풍모
제품 번호.:
AR4215지불:
FOB제품 원산지:
China색깔:
white배송 포트:
ShenZhen ports리드 타임:
20 days
TEL : + 86-4000988557;
스카이프 ID : gfreex@hotmail.com;
위챗 : STEP_ADTECH;
QQ ID : 8936906.
High 속도와 정밀도 SCARA 로봇
사양 :
프로그래밍 : AR, g 코드 프로그래밍 언어
가장 빠른 속도 : 0.38 에스
정확도 : 보다 작음 0.02 mm
응용 프로그램 : 따라야 할 온라인 속도
특징 :
응용 프로그램 :
PCBA 에 적합 플러그, 취급, 시각적 분류, 조립, 나사, 로딩, 운송, 플러그인 기계, 납땜 및 기타 고정밀 산업 ---- 전자 및 식품 산업 .
성능 벤치 마크-매개 변수 :
모델명 | ADT | 토시바 | EPSON | 야마하 | ||
AR4215 | THL400 | LS3-401 | YK400XG-150 | |||
제품 특징 | 고속, 고정밀, 높은 비용 효율성 | 저비용, 경량, 에너지 | 고속, 고정밀, 높은 비용 효율성 | 비용 효율적인 기계 | ||
축 사양 | x 축 | 팔 길이 | 200mm | 225mm | 225mm | 250mm |
회전 범위 | ± 127 ° | ± 125 ° | ± 132 ° | ± 140 ° | ||
y 축 | 팔 길이 | 200mm | 200mm | 175mm | 150mm | |
회전 범위 | ± 142 ° | ± 145 ° | ± 141 ° | ± 144 ° | ||
z 축 | 노선 | 150mm | 160mm | 150mm | 150mm | |
r 축 | 회전 범위 | ± 360 ° | ± 360 ° | ± 360 ° | ± 360 ° | |
최고 속도 | x 축 | 600 ° / S | 660 ° / S |
|
| |
y 축 | 375 ° / S | 660 ° / S |
|
| ||
X, y 축 합성 | 5.5m / s | 6.3m / s | 6 분 / s | 6.1m / s | ||
z 축 | 1.3m / s | 1.2m / s | 1.1m / s | 1.1m / s | ||
r 축 | 1667 ° / s | 1500 ° / s | 2600 ° / s | 1020 ° / s | ||
반복 위치 정확도 | X, Y 축 | ± 0.01mm | ± 0.01mm | ± 0.01mm | ± 0.01mm | |
z 축 | ± 0.01mm | ± 0.015mm | ± 0.01mm | ± 0.01mm | ||
r 축 | ± 0.005 ° | ± 0.007 ° | ± 0.01 ° | ± 0.004 ° | ||
표준주기 시간 | 0.45 초 | 0.47 | 0.42 초 | 0.49 | ||
등급 / 최대 하중 | 2Kg / 5kg | 2Kg / 5kg | 1kg / 3kg | 5kg | ||
r 축은 관성 부하 모멘트를 허용합니다. (Rated / max) | 0.01 kg · m2 | 0.05 kg · m2 | 0.05 kg · m2 | 0.05 kg · m2 | ||
0.04 kg · m2 | 0.005 kg · m2 | |||||
사용자 신호선 | 0.2 제곱 × 16 줄 | 8 개 입력 / 8 개의 출력 | 0.15 제곱 × 15 윤곽 | 0.2 제곱 × 10 윤곽 | ||
6 입력 / 8 출력 | ||||||
사용자 기관 | Ф6 × 2 | φ4 × 3 | φ4 × 1 | φ4 × 3 | ||
Ф6 × 2 | ||||||
제한 보호 | 1, 소프트웨어 한계 | 1, 소프트웨어 한계 | 1, 소프트웨어 한계 | 1, 소프트웨어 한계 | ||
2, 기계적 한계 (X, Y, z 축) | 2, 기계적 한계 (X, Y, z 축) | 2, 기계적 한계 (X, Y, z 축) | 2, 기계적 한계 (X, Y, z 축) | |||
무게 | 13Kg | 13Kg | 14Kg | 19Kg | ||
이동 space :
선택 하이라이트 :
1. 업무 범위 : 로봇 팔 길이, 작동 범위
2. 로드 : 그리퍼 디자인, 가능한 한 낮은 관성
3. 정확도 : 반복 위치 정확도
4. 일의 비트 : 동작주기 시간, 가스 소비 시간 동작
5.I / o 점 : 범용 입력 및 출력 포인트
6. 비주얼 패키지 : 정적 크롤링, 동적 크롤링
7. 통신 : 나는 / O, 네트워크, 직렬

ADTECH 4 축 스카라 고성능과 우수한 정밀도를 가진 로봇 팔.

저렴한 가격으로 중국의 산업용 로봇 제조업체 ADTECH FR5215 시스템 5500mm 팔 길이 4 축 호이 스팅 scara avs 비전 system. ADTECH 4 축 스카라 로봇 R & D, 생산 및 서비스. 용 제품 인력 비용 절감 생산 라인에 점점 더 많은 로봇이 사용되고 있습니다. ADTECH 스카라 로봇은 NACHI, TOSHIBA 등을 대체 할 수 있습니다.일본 브랜드, PCBA 조립, 나사 적재, 포장, etc. 전기 field.
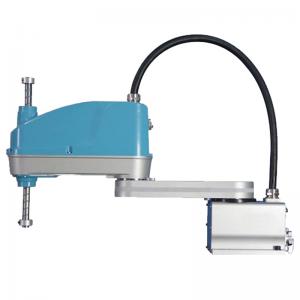
OEM 스카라 로봇은 Samsung, Foxconn, LG 와 같은 전기 부품 조립으로 공장 용으로 설계되었습니다.그리고 캐논 등.

TR600B 네 축 SCARA 산업용 로봇 로봇은 다 관절 4 축 완전한 독립 재산권 권리를 가진 로봇. 고속 포인트 모션, 공간 선형 보간 모션, 공간 호 보간 및 기타 기능을 달성하기 위해 로봇을 제어하는 고성능 컨트롤러를 채택합니다. 운송, 적재 및 하역, 스폿 용접, 접착 등과 같은 다양한 산업 현장에 적합합니다.

금속 가공 산업 : 펀칭기의 블랭킹 CNC 로딩 및 언 로딩, 공작물 연삭, 디버링; 전자 제품 산업 : 조립, IC 칩 테스트 및 취급, 스폿 용접, PCBA 납땜, 접착제 도포, 나사 체결, 플러그인, 공작물 연마; 자동차 및 오토바이 부품 산업 : 취급, 접착, 스폿 용접; LCD / LED 및 유리 산업 : 유리판 취급, lcm 모듈 조립, 실리콘 웨이퍼 및 디스플레이 취급 레이저 산업 : 스폿 용접, 절단; 가전 산업 : 가전 제품의 조립, 취급 및 나사 조임 제품; 연구 영역 : 학생 교육, 학교 연구 및 개발.

TR800B 네 축 SCARA 산업 로봇 : 로봇은 다 관절 4 축 LBD. 의 완전한 독립 재산권을 가진 로봇고성능 컨트롤러를 사용하여 로봇을 제어하여 고속 포인트 모션, 공간 선형 보간 모션, 공간 호 보간 및 기타 기능을 달성합니다. 취급, 적재 및 하역에 적합합니다. , 스폿 용접, 접착 및 기타 산업

SCARA 다 관절 조작자는 회사의 에 속합니다.고정밀, 고속, 고성능 로봇. 이 제품은 주로 3C 에서 로봇 잠금 나사의 적용을 목표로합니다. 산업. 이 제품은 이전에 개발 된 SCARA 를 기반으로 개발되었습니다. 600 이있는 로봇 본체팔 길이. 특별한 비표준 시각적 포지셔닝 기능이있는 나사 잠금 용 로봇

야스카와 스카라 로봇 SOC 시리즈: MOTOMAN-SOC 시리즈는 고속 작업을 위해 특별히 제작된 SCARA 로봇입니다. 소형 부품의 조립, 운송, 포장, 분류, 검사 등 다양한 시나리오 에 적합합니다 .

빠르고 안정적인 델타 로봇 공급. 그것은 panasonic 으로 구축 서보. 생산 라인에서 비전 카메라 지원

4 축 델타 로봇 / 거미 로봇은 식품 포장 산업에 적합합니다. 로봇 비전 시스템은 사용 가능 또한 !

4축 델타 로봇은 생산 라인의 식품 포장용으로 설계되었습니다. 초콜릿, 비스킷 및 빵 공장 제조업체와 같은

산업용 델타 거미 로봇 : 400mm-1200mm 작동 직경 1 ~ 3kg 등급 유효 탑재량 케바 티치 펜던트

산업용 델타 스파이더 로봇: 400mm-1200mm 작동 직경 1-3kg 정격 페이로드 KEBA 티치 펜던트

* Delta 로봇은 비용 효율적이고 고품질이며 저비용이며 고객을 위해 OEM 디자인을 사용자 지정할 수 있으며 다양한 시각 센서 정보를 지원합니다. * TRD 로봇 응용 시스템은 크게 로봇, 와이어 공급 및 로봇 설치 프레임의 세 부분으로 구성됩니다. 로봇은 기판, 모터 커버, 회전 샤프트, 메인 로봇 암으로 구성됩니다. 보조 기계 암과 그리퍼 센터로 구성됩니다.

델타 로봇은 고전적인 병렬 로봇 구성입니다. 3 차원 XYZ z 축을 중심으로 이동 및 회전. 빠른 속도, 우수한 정확성, 높은 신뢰성, 강력한 사용 용이성 및 낮은 유지 보수 비용의 장점이 있습니다. 고속 분류 및 포장 분야에서 널리 사용됩니다.

* 제품 장점 : 빠른 속도, 고정밀 * 긴 서비스 수명 및 안정적인 성능 * 강함 호환성 및 강력한 유연성 * 단순 제어 및 사용 용이성

*로봇의 장점: 빠른 속도, 고정밀 *긴 서비스 수명 및 안정적인 성능 *강력한 호환성 및 강력한 유연성 *간단한 제어 및 사용 용이성



















계속 읽고, 계속 게시하고, 구독하십시오. what 당신은 생각합니다.
 IPv6 네트워크 지원 粤ICP备2021036697号
IPv6 네트워크 지원 粤ICP备2021036697号 온라인 서비스
온라인 서비스 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com