 한국의
한국의 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 Tiếng việt
Tiếng việt



지금 전화 해
TEL : + 86-4000988557;
스카이프 ID : gfreex@hotmail.com;
위챗 : STEP_ADTECH;
QQ ID : 8936906.

산업용 로봇은 다 관절 조작자 또는 다 자유도 산업 분야에 맞춘 기계 장치 자동으로 작업을 수행 할 수 있으며 다양한 기능을 수행하기 위해 자체 전력 및 제어 기능에 의존하는 기계입니다. 그것은 인간이 명령 할 수 있으며 사전 배열 에 따라 실행할 수도 있습니다. 프로그램. 현대의 산업용 로봇은 인공 지능 기술에 의해 수립 된 원칙과 지침에 따라 작업을 수행 할 수도 있습니다.

ISO 를 준수하는 최초의 산업용 로봇 표준은 빌 그리피스 테일러에 의해 1937 년에 제작되었습니다. 1938 년 3 월 메카 노 잡지에 게재 됨. 이 크레 인형 산업용 로봇은 메카 노 부품으로 만들어지며 단일 전기 모터로 구동됩니다. 이 산업용 로봇은 사전 프로그래밍 된 방법.


▲ 조지 Davor
로봇 공학은 다 분야 기계, 전자, 컴퓨터 과학, 제어, 인공 지능, 물리학 및 수학 분야를 결합한 분야입니다. 산업용 로봇은 6 개의 기본 구성 요소로 구성됩니다. 동적 단위, end-of-arm 기계, 디지털 컴퓨터 컨트롤러, 액추에이터, 입력 장치 및 검출기.


▲ abb 산업용 로봇은 "Fanta Tank" 도전
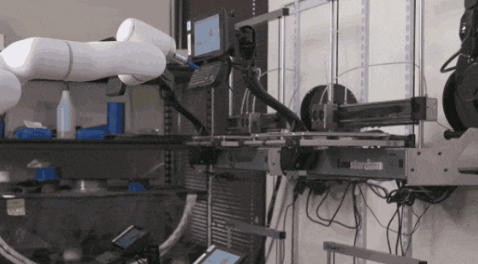
관절 형 구성 : 관절 식 팔은 인간의 팔과 매우 유사한 가장 일반적인 로봇 팔입니다. 일반적으로 6 축 기계, 그들 중복성을 제공하고 smoother.
▲ 관절 형 조인트 구성

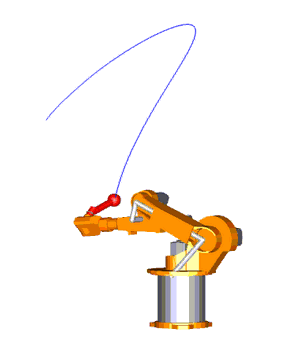
▲ 스카라 구성 공동 구성
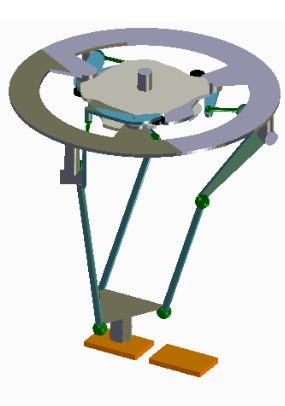
▲ 병렬 산업용 로봇
병렬 메커니즘은 closed-loop 로 정의 할 수 있습니다. 이동 플랫폼과 고정 플랫폼이 적어도 두 개의 독립적 인 운동학 체인의 경우 메커니즘은 2 개 이상의 자유도를 가지며 병렬로 구동됩니다.
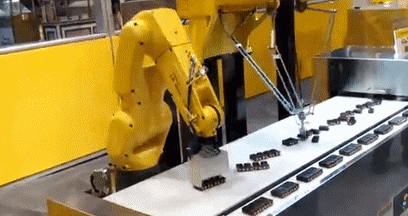
산업용 로봇의 일반적인 응용 분야에는 용접, 도장, 조립, 수집 및 배치 (예 : 포장, 팔레 타이 징 및 SMT), 제품 검사 및 테스트 등이 포함됩니다. 모든 작업은 고효율, 내구성, 속도 및 정확도로 완료됩니다.
작업 작업을보다 정확하게 수행하기 위해 산업용 로봇에는 일반적으로 머신 비전 서브 시스템이 포함됩니다. 강력한 컴퓨터 또는 컨트롤러에 연결된 비전 센서. 용 현대 산업용 로봇, 인공 지능 로봇점점 더 중요 해지고있는 장비입니다.

TEL : + 86-4000988557;
스카이프 ID : gfreex@hotmail.com;
위챗 : STEP_ADTECH;
QQ ID : 8936906.
















계속 읽고, 계속 게시하고, 구독하십시오. what 당신은 생각합니다.
 IPv6 네트워크 지원 粤ICP备2021036697号-1
IPv6 네트워크 지원 粤ICP备2021036697号-1 온라인 서비스
온라인 서비스 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com gfreex@hotmail.com
gfreex@hotmail.com Felix
Felix 8936906
8936906 Troysupply_com
Troysupply_com